Aplicație HDD de motor. "Ajutați-vă cu începutul motorului de pe hard disk!". Ca urmare
Motorul rotativ al hard diskului (sau CD / DVD-ROM) este un motor trifazic sincron curent continuu.
Puteți solicita un astfel de motor prin conectarea la trei cascade semi-pod, care sunt controlate de un generator trifazat, frecvența căreia este foarte mică când este pornită și apoi se ridică fără probleme la nominal. Aceasta nu este cea mai bună soluție la problemă, o astfel de schemă nu are feedback și, prin urmare, frecvența generatorului va crește în speranța că motorul are timp să câștige impuls, chiar dacă, de fapt, arborele sale este încă. Crearea unui sistem de feedback ar necesita utilizarea senzorilor poziției rotorului și mai multe EMS se bazează, fără a număra tranzistoarele de ieșire. CD / DVD-ROM conține deja senzorii Hall, de-a lungul semnalelor pe care le puteți determina poziția rotorului motorului, dar uneori nu contează exact poziția exactă și nu doriți să spălați "firele suplimentare".
Din fericire, industria produce drivere de control cu \u200b\u200bun singur cip gata, care, pe lângă aceasta, nu au nevoie de senzorii poziției rotorului, înfășurările motorului sunt acționate în rolul unor astfel de senzori.Microcircuitele de control ale motoarelor DC trifazate care nu sunt necesare senzori suplimentari (Senzorii sunt înfășurari de motor):TDA.5140; TDA.5141; TDA.5142; TDA.5144; TDA.5145 și, bineînțeles LIVRE.11880. (Există altele, dar un alt moment.)
Schema schematică a conexiunii motorului la microcircuitul LB11880.
Inițial, acest microcircuit este proiectat pentru a controla înregistrările video BVG motor, în cascade cheie, are tranzistoare bipolare și nu MOSFET.În structurile sale, am folosit acest cip particular, mai întâi, sa dovedit a fi în cel mai apropiat magazin, în al doilea rând, costul său a fost mai mic (deși nu prea mult) decât în \u200b\u200balte jetoane de deasupra listei.
De fapt, circuitul de putere al motorului:

Dacă motorul dvs. nu are brusc 3 ieșiri, atunci acesta trebuie conectat conform schemei:

Și o altă schemă vizuală adaptată pentru utilizare în mașină.
Puțin mai multe informații despre LB11880 și nu numai
Motorul conectat prin schemele specificate se va accelera până când limita de la frecvența de generare a cipului VCO, determinată de rapoartele condensatorului conectate la ieșirea 27 (modul în care capacitatea sa este mai mică, cu atât frecvența este mai mare) sau motorul nu vor fi distruse mecanic.Nu trebuie să fie prea redusă prin capacitatea condensatorului conectat la ieșire 27, deoarece poate face dificilă pornirea motorului.
Cum se adaptează viteza de rotație?
Reglarea vitezei de rotație se face prin schimbarea tensiunii la ieșirea de 2 chipsuri, respectiv: VPIT - viteza maxima; 0 - Motorul este oprit.
Cu toate acestea, trebuie remarcat faptul că nu este posibilă ajustarea fără probleme a frecvenței pur și simplu prin aplicarea unui rezistor variabil, deoarece ajustarea nu este liniară și apare într-o limită mai mică decât VPIT - 0, pe acest lucru cea mai bună opțiune Va fi o conexiune la acest condensator la care printr-un rezistor, de exemplu, un microcontroler este dat de semnalul PWM și sau de regulator PWM pe cronometrul celebru din lumeNe.555 (astfel de scheme de pe Internet sunt pe deplin)
Pentru a determina viteza curentă, trebuie utilizat ieșirea a 8 așchii, pe care sunt prezente impulsurile la rotirea arborelui motorului, 3 impulsuri pe o cifră de afaceri a arborelui 1.
Cum se stabilește curentul maxim în înfășurări?
Se știe că motoarele DC trifazate consumă un curent semnificativ în afara modurilor de funcționare (când sunt alimentate de un impuls de frecvență legat).Pentru a seta curentul maxim în această schemă, rezistorul R1 este servit.De îndată ce tensiunea picătură pe R1 și, prin urmare, ieșirea 20 va deveni mai mare de 0,95 volți, apoi driverul de ieșire al cipului întrerupe pulsul.Alegerea valorii R1, considerați că pentru acest cip, curentul maxim nu este mai mare de 1,2 amperi, nominal 0.4 amp.
Parametri Chip LB11880.
Tensiunea de alimentare a etapei de ieșire (concluzie 21): 8 ... 13 volți (maximum 14,5);
Suprafața de alimentare (ieșire 3): 4 ... 6 volți (maximum 7);
Puterea maximă a microcircuitului de împrăștiere: 2.8 Watt;
Intervalul de temperatură de funcționare: -20 ... +75 grade.

Acest disc (deși atunci când nu au existat șuruburi de cupru pe ea), ar părea un motor mic și rigid de la un hard disk vechi la 40 GB, conceput pentru 7200 de revoluții / min (rpm) a reușit să accelereze aproximativ 15.000 ... 17000 revoluții / min dacă nu limitați viteza sa. Deci, zona de utilizare a motoarelor de la reglarea hard disk-urilor, cred că foarte extinse. Ascuțirea / Drill / Bulgaria nu este cu siguranță făcută, nici măcar nu gândesc, dar fără o sarcină specială, motoarele sunt capabile de mult.
F.
arhiva AL auto-asamblare Kacham.
Noroc !!
În hard disk-uri, sunt utilizate motoare fără fundal cu trei faze. Înfășurarea motorului este conectată de stea, adică obținem 3 ieșiri (3 faze). Unele motoare au 4 ieșiri, au retras suplimentar punctul mediu de legătură al tuturor înfășurărilor.
Pentru a vă relaxa motorul Neclector, este necesar în ordinea corectă și la anumite momente în timp, în funcție de poziția rotorului, pentru a alimenta tensiunea înfășurărilor. Pentru a determina momentul de comutare la motor, sunt instalate senzorii Hall, care joacă rolul de feedback.
În hard disk-uri, se utilizează o altă metodă de determinare a momentului comutatorului, două înfășurări sunt conectate la putere la putere, iar a treia tensiune este măsurată, pe baza comutatorului. Într-o versiune cu 4 fire, ambele ieșiri de înfășurare libere sunt disponibile pentru acest lucru și în cazul unui motor cu 3 ieșiri, este creat un punct mediu virtual, folosind rezistențele stea conectate și conectate paralel cu înfășurările motorului. Deoarece comutarea înfășurărilor este efectuată de poziția rotorului, există o sincronizare între frecvența rotativă a rotorului și câmpul magnetic creat de înfășurările motorului. Tulburarea de sincronizare poate duce la opritorul rotorului. 
Există chips-uri specializate, cum ar fi TDA5140, TDA5141, 42.43 și alte destinate controlului prin motoare cu trei faze de descoperit, dar nu le voi lua în considerare aici.
În cazul general, diagrama de comutare este 3 semnal cu impulsuri de formă dreptunghiulară, deplasată cu o fază cu 120 de grade. În cea mai simplă versiune, puteți porni motorul fără feedback, pur și simplu hrăniți 3 semnale dreptunghiulare (meander), compensate între ele cu 120 de grade, pe care le-am făcut. Într-o perioadă de meandru, câmpul magnetic creat de înfășurări face ca o întoarcere completă în jurul axei motorului. Viteza de rotație a rotorului depinde de numărul de poli magnetici de pe el. Dacă numărul de poli este două (o pereche de poli), rotorul se va roti cu aceeași frecvență ca și câmpul magnetic. În cazul meu, rotorul motorului are 8 poli (4 perechi de poli), adică rotorul se rotește de 4 ori mai lent decât câmpul magnetic. Cele mai multe hard disk cu o frecvență de rotație de 7200 rpm, rotorul trebuie să aibă 8 poli, dar aceasta este doar ipoteza mea, deoarece nu am verificat grămada de winchesters. 
Dacă motorul este aplicat motorului cu frecvența necesară, în conformitate cu viteza de rotație dorită de rotație, acesta nu va fi promovat. Aici aveți nevoie de procedură de overclocking, adică primim mai întâi impulsuri cu o frecvență joasă, apoi crește treptat la frecvența dorită. În plus, procesul de overclockare depinde de sarcina de pe arbore.
Pentru a porni motorul, am aplicat microcontrolerul PIC16F628A. În partea de putere există o punte trifazată asupra tranzistoarelor bipolare, deși este mai bine să utilizați tranzistoare de câmp pentru a reduce disiparea căldurii. Impulsurile dreptunghiulare sunt formate în subrutina de manipulator întrerupt. Pentru a obține 3 semnale deplasate cu faza, sunt efectuate 6 întreruperi, în timp ce obținem o perioadă de meandru. În programul Microcontroler, am implementat o creștere netedă a frecvenței semnalului la o valoare dată. Există doar 8 moduri cu frecvență specificată de semnal specificată: 40, 80, 120, 160, 200, 240, 280, 320 Hz. Cu 8 poli pe rotor, obținem următoarele viteze de rotație: 10, 20, 30, 40, 50, 60, 70, 80 rpm. 
Accelerarea începe cu 3 Hz timp de 0,5 secunde, acest timp experimental necesar pentru promovarea inițială a rotorului în direcția corespunzătoare, deoarece se întâmplă că rotorul se transformă într-un unghi mic în direcția opusă, atunci începe să se rotească în direcția corespunzătoare. În același timp, momentul de inerție este pierdut, iar dacă începeți imediat o creștere a frecvenței, există o distanță, rotorul din rotația ei pur și simplu nu va avea timp pentru câmpul magnetic. Pentru a schimba direcția de rotație, trebuie doar să schimbați 2 faze motorii.
După 0,5 secunde, apare o creștere netedă a frecvenței semnalului la o valoare dată. Frecvența crește în conformitate cu legea neliniară, rata de creștere a frecvenței crește de-a lungul overclocking-ului. Timpul de accelerare a rotorului la vitezele specificate: 3.8; 7.8; 11,9; şaisprezece; 20.2; 26,3; 37,5; 48.2 sec. În general, fără feedback, motorul este accelerat strâns, timpul de accelerare necesar depinde de sarcina de pe arbore, am cheltuit toate experimentele fără a scoate discul magnetic ("naibii"), în mod natural fără ea, puteți accelera.
Comutarea modurilor este efectuată cu butonul SB1, indicarea modului este realizată pe LED-urile HL1-HL3, informațiile sunt afișate în codul binar, HL3 este zero bit, HL2 este primul bit, HL1 - al treilea lot. Când toate LED-urile sunt rambursate, obținem numărul de zero, acesta corespunde primului mod (40 Hz, 10 RD / s), dacă de exemplu, LED-ul HL1 este aprins, obținem numărul 4, care corespunde celei de-a cincea (200 Hz, 50 rd / s). Switch Sa1 Rulați sau opriți motorul, starea de contact închisă corespunde comenzii "Start".
Modul de viteză selectat poate fi înregistrat în EEPROM-ul microcontrolerului, pentru că trebuie să țineți apăsat butonul SB1 timp de o secundă, în timp ce toate LED-urile vor clipi, confirmând astfel intrarea. În mod implicit, în absența unei intrări în EEPROM, microcontrolerul intră în primul mod. Astfel, scriind în modul memorie și instalarea comutatorului SA1 în poziția "Start", puteți porni motorul pur și simplu prin alimentarea alimentării dispozitivului.
Cuplul motorului este mic, care nu este necesar atunci când lucrați pe hard disk. Cu o creștere a încărcăturii pe arbore, există o distanță și rotorul se oprește. În principiu, dacă trebuie să atașați senzorul revoluțiilor și în absența unui semnal, opriți alimentarea și re-promovați motorul.
Prin adăugarea a 3 tranzistoare într-o punte cu trei faze, puteți reduce numărul de linii de control ale microcontrolerului la 3, așa cum se arată în diagrama de mai jos. 
Cumva cu mult timp în urmă a venit peste schema de șofer motorul pasului Pe cipul LB11880, dar din moment ce nu aveam un astfel de cip, și motoarele stăteau câteva piese, am amânat un proiect interesant, cu lansarea motorului într-o cutie lungă. Timpul a trecut, iar acum, cu dezvoltarea Chinei, nu există probleme cu detaliile, așa că am comandat MS și am decis să colectez și să testez conexiunea motoarelor de mare viteză de la HDD. Diagrama șoferului este luată standard:
Diagrama șoferului motor
Apoi, există o descriere abreviată a articolului, citiți completă. Motorul rotativ al arborelui hard disk (sau CD / DVD-ROM) este motorul cu trei faze obișnuit cu trei faze DC. Industria produce drivere de control cu \u200b\u200bun singur cip gata, care nu sunt, de asemenea, necesare senzorilor poziției rotorului, deoarece înfășurările motorului sunt acționate în rolul unor astfel de senzori. Microcircuitele de control ale motoarelor DC Tri-faze care nu necesită senzori suplimentari sunt TDA5140; TDA5141; TDA5142; TDA5144; TDA5145 și, bineînțeles Lb11880..

Motorul conectat în conformitate cu schemele specificate se va accelera până la limita frecvenței de generare a cipului VCO, determinată de ratele condensatorului conectate la ieșirea 27 (decât capacitatea sa este mai mică, cu atât frecvența este mai mare) sau motorul nu vor fi distruse mecanic. Nu trebuie să fie prea redusă prin capacitatea condensatorului conectat la ieșire 27, deoarece poate face dificilă pornirea motorului. Reglarea vitezei de rotație se face prin schimbarea tensiunii la ieșirea de 2 chipsuri, respectiv: VPIT - viteza maximă; 0 - Motorul este oprit. De la autor există o confiscare, dar mi-am răspândit propria opțiune ca mai compactă.

Mai târziu, chipsurile LB11880 comandate de mine, sigilate în două manifentare finalizate și au petrecut unul dintre ei. Totul funcționează perfect: rata este reglementată de schimbare, cifra de afaceri este dificil de determinat, dar cred că este de până la 10.000 exact, deoarece motorul se bucură decent.

În general, începutul este pus, voi gândi unde să se aplice. Există un gând de a face același disc de ascuțire ca autorul. Și acum a fost testat pe o bucată de plastic, a făcut tipul de ventilator, suflând doar brutal cel puțin în fotografie nu este chiar vizibil, deoarece se rotește.

Ridicați revoluțiile de peste 20.000 prin comutarea condensatoarelor condensatorului C10 și a alimentării cu MS la 18 V (18,5 pe limită). Pe această tensiune, am o mașină de fluier de motor! Aici este un videoclip cu alimente de 12 volți:
Conexiuni video cu motor HDD
Am conectat motorul de pe CD, a condus dieta de 18 V, pentru că în mingea mea în interiorul mingii, accelerează astfel încât să sare totul în jur! Este o păcat să nu urmărească revoluțiile, dar dacă judecați sunetul, este foarte mare, la un fluier subțire. Unde să utilizați astfel de viteze, aici este întrebarea? Vine la minții Mini Bulgarian, un burghiu de bord, o mașină de măcinat ... o mulțime de aplicații - gândiți-vă singur. Colectați, testați, împărtășiți impresiile. Pe Internet există numeroase comentarii utilizând datele motoarelor în structuri interesante de casă. Pe Internet, am văzut videoclipul, există coolibins cu acești maeștri motorii motor, fanii super, ascuțitori, puteți să-l scoateți unde să aplicați o astfel de furie, motorul aici accelerează peste 27.000 de revoluții. Cu tine era Igoran..
Discutați un articol Cum să conectați un motor de la DVD sau HDD
Motorul rotativ al arborelui hard disk (sau CD / DVD-ROM) este un motor DC trifazic sincron.Puteți promova un astfel de motor prin conectarea la trei cascade pe jumătate de dimensiuni, care sunt gestionate de un generator trifazic, frecvența căreia este foarte mică atunci când este pornită și apoi se ridică fără probleme la nominal. Aceasta nu este cea mai bună soluție la problemă, o astfel de schemă nu are feedback și, prin urmare, frecvența generatorului va crește în speranța că motorul are timp să câștige impuls, chiar dacă, de fapt, arborele sale este încă. Crearea unui sistem de feedback ar necesita utilizarea senzorilor poziției rotorului și mai multe EMS se bazează, fără a număra tranzistoarele de ieșire. CD / DVD-ROM conține deja senzorii Hall, de-a lungul semnalelor pe care le puteți determina poziția rotorului motorului, dar uneori nu contează exact poziția exactă și nu doriți să spălați "firele suplimentare".
Din fericire, industria produce drivere de control cu \u200b\u200bun singur cip gata, care, pe lângă aceasta, nu au nevoie de senzorii poziției rotorului, înfășurările motorului sunt acționate în rolul unor astfel de senzori.
Microcircuitele de control ale motoarelor DC trifazate care nu necesită senzori suplimentari (senzori sunt înfășurarea motorului):
LB11880; TDA5140; TDA5141; TDA5142; TDA5144; TDA5145..
Există și alții, dar din anumite motive nu sunt în vânzare, unde căutam, dar nu-mi place să aștept de la 2 la 30 de săptămâni de ordine.
Conceptul conexiunii motorului la microcircuitul LB11880
Inițial, acest microcircuit este proiectat pentru a controla VCR-ul motorului BVG, astfel încât este vechi, în cascade-cheie, are tranzistoare bipolare și nu MOSFET.În desenele sale, am folosit acest cip particular, mai întâi, sa dovedit a fi în cel mai apropiat magazin, în al doilea rând, costul său a fost mai mic decât cel al altor jetoane din lista de mai sus.
De fapt, circuitul de putere al motorului:

Dacă motorul dvs. nu are 3 ieșiri 4, apoi conectați-l urmeze schema:

Puțin mai multe informații despre LB11880 și nu numai
Motorul conectat prin schemele specificate se va accelera până când limita de la frecvența de generare a cipului VCO, determinată de rapoartele condensatorului conectate la ieșirea 27 (modul în care capacitatea sa este mai mică, cu atât frecvența este mai mare) sau motorul nu vor fi distruse mecanic.Nu trebuie să fie prea redusă prin capacitatea condensatorului conectat la ieșire 27, deoarece poate face dificilă pornirea motorului.
Cum se adaptează viteza de rotație?
Reglarea vitezei de rotație se face prin schimbarea tensiunii la ieșirea de 2 chipsuri, respectiv: VPIT - viteza maximă; 0 - Motorul este oprit.
Cu toate acestea, trebuie remarcat faptul că nu este posibilă ajustarea fără probleme a frecvenței pur și simplu prin aplicarea rezistenței variabile, deoarece ajustarea nu este liniară și apare într-o limită mai mică decât un VPIT - 0, pe această opțiune cea mai bună va fi conectată la acest lucru Condensator cu care printr-un rezistor, de exemplu de la un microcontroler. Semnal PWM.
Pentru a determina viteza curentă, trebuie utilizat ieșirea a 8 așchii, pe care sunt prezente impulsurile la rotirea arborelui motorului, 3 impulsuri pe o cifră de afaceri a arborelui 1.
Cum se stabilește curentul maxim în înfășurări?
Se știe că motoarele DC trifazate consumă un curent semnificativ în afara modurilor de funcționare (când sunt alimentate de un impuls de frecvență legat).
Pentru a seta curentul maxim în această schemă, rezistorul R1 este servit.
De îndată ce tensiunea picătură pe R1 și, prin urmare, ieșirea 20 va deveni mai mare de 0,95 volți, apoi driverul de ieșire al cipului întrerupe pulsul.
Alegerea valorii R1, considerați că pentru acest cip, curentul maxim nu este mai mare de 1,2 amperi, nominal 0.4 amp.
Parametri Chip LB11880.
Tensiunea de alimentare a etapei de ieșire (concluzie 21): 8 ... 13 volți (maximum 14,5);
Suprafața de alimentare (ieșire 3): 4 ... 6 volți (maximum 7);
Puterea maximă a microcircuitului de împrăștiere: 2.8 Watt;
Intervalul de temperatură de funcționare: -20 ... +75 grade.
Dar de fapt, pentru care am aplicat motorul de la HDD împreună cu microcircuitul specificat: 
Acest disc (deși atunci când nu au existat șuruburi de cupru pe ea), se pare că motorul mic și rigid de la vechiul Winchester Seagate Barracuda, la 40 GB, proiectat pentru 7200 de revoluții / min (rpm) a reușit să overclock până la 15000 ... 17000 revoluții / min, dacă nu mi-am limitat viteza. Deci, zona de utilizare a motoarelor de la reglarea hard disk-urilor, cred că foarte extinse. Cu siguranță nu este de a face burghiul / bulgar, dar nici măcar nu gândește, dar fără o sarcină specială, motoarele sunt capabile de mult, de exemplu, dacă se rotesc tamburul cu oglinzi, pentru expandarea mecanică a fasciculului laser, etc.
Atunci când utilizați unitățile vechi HDD în scopuri aplicate, uneori există o problemă cu faptul că motorul arborelui se oprește după un timp după lansare. Ei au un astfel de "cip" - dacă nu există semnale de la blocul de cap la micro-controler, atunci interzice microcircuitul să rotească motorul. De exemplu, modelele multiple de antrenare Să încercăm să găsim cum să o rezolvăm.
Totul a început cu faptul că au adus mai multe hard diskuri vechi ( fig.1.) Și au spus că aici muncitorii sunt în fața "ucis", vrei - alegeți, nu doriți - faceți ceea ce doriți. Dar dacă vă dați seama cum să le utilizați ca pe o mică emeerie pentru editarea uneltelor, spuneți-mi. Ei bine, aici - spun ...
Primul HDD - Cuantum Family "Fireball TM" Cu cipul TDA5147AK Drive ( fig.2.). Să vedem ce este.

Capacul superior este fixat cu 4 șuruburi în colțuri și un șurub și piulița, sub vârf, sub autocolante. După îndepărtarea capacului, discul rigid este vizibil, capete de citire și sistem magnetic de gestionare a poziției capului ( figura 3.). Deconectăm cablul, deșurubați sistemul magnetic (aici aveți nevoie de o cheie hexagonală special ascuțită "Star"). Dacă doriți, discul poate fi, de asemenea, eliminat dacă deșurubați cele trei șuruburi de pe arborele motorului (aveți nevoie și de un hexagon).

Acum punem capacul în loc, astfel încât să puteți transforma HDD-ul pentru experimentele cu electronice și alimentate în conectorul de alimentare al tensiunii +5 V și + 12V. Motorul este accelerat, funcționează aproximativ 30 de secunde și apoi se oprește (există un LED verde pe placa de circuit imprimat - arde atunci când motorul este rotit și clipește când se oprește).
Rețeaua este ușor localizată pe cipul TDA5147K, dar nu a reușit să se ocupe de semnalul de rezoluție / interdicție. Când "tragerea" semnalele porilor la magistrala electrică, nu a fost posibilă realizarea reacției necesare, dar când vizualizați semnalele cu un osciloscop, sa dovedit că atunci când sonda 7th retragerea cipului TDA5147AK este resetarea și repornirea motor. Astfel, prin colectarea celui mai simplu generator de impuls scurt ( fig.4., Mai jos foto) Cu o perioadă de câteva secunde (sau zeci de secunde), puteți forța motorul să se rotească mai mult sau mai puțin în mod constant. Pauzele emergente din sursa de alimentare durează aproximativ 0,5 secunde și acest lucru nu este esențial dacă motorul este utilizat cu o sarcină mică pe arbore, dar în alte cazuri poate fi inacceptabilă. Prin urmare, metoda este, deși eficientă, dar nu este corectă. Și "corect" de lansare și a eșuat.

Următorul HDD - "Familiile" Quantum "Trailblazer" (fig.5.).

La furnizarea tensiunilor de alimentare, unitatea nu furnizează semne de viață și microcircuitul de 14-107540-03 începe pe placa electronică. În mijlocul carcasei cipului, convexitatea este vizibilă ( fig.6.) Ce vorbește despre inoperabilitatea ei explicită. Este o rușine, dar nu înfricoșătoare.

Ne uităm la microcircuitul de control al rotației motorului ( fig.7.) - HA13555. Nu se încălzește și nu există daune vizibile. Testarea testerului elementelor "strapping" nu a știut nimic special - rămâne doar pentru a face față schemei de "incluziune".

Motoarele de căutare DataShet nu o găsesc, dar există o descriere despre HA13561F. Se face în același caz, coincide pe picioarele nuci și pe concluziile "ieșire" cu HA13555 (acesta din urmă la conductorii de putere a motorului au măturat diode - protecția împotriva contra-EMF). Să încercăm să determinăm concluziile necesare de gestionare. Din Datasheet de pe HA13561F ( fig.8.) Rezultă că frecvența ceasului de 5 MHz cu nivelul logicii TTL trebuie să fie aplicată la ieșirea 42 (ceasul) și că semnalul care permite pornirea motorului nivel inalt La ieșirea 44 (Spnenab).

Deoarece cipul 14-107540-03 nu funcționează, atunci am tăiat puterea +5 din ea și de la toate celelalte jetoane, cu excepția HA13555 ( fig.9.). Tester Verificați corectitudinea "tăierilor" asupra absenței compușilor.
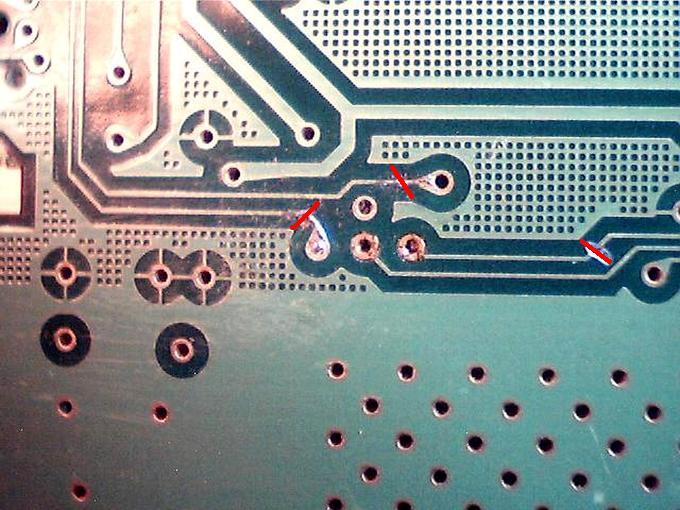
Pe fotografia inferioară figura 9. Doturile roșii care prezintă subfield-ul de stres +5 în HA13555 și rezistorul "Suspensoare la plus" de ieșire 44. Dacă rezistența de ieșire 45 este îndepărtată din locul nativ (acesta este R105 figura 8.) și puneți-o vertical cu o înclinație la cip, apoi un rezistor suplimentar pentru suspendat la "plus" al ieșirii 44 poate fi lipit la deschiderea de tranziție și la ieșirea silențioasă a primului rezistor ( fig.10.) Și apoi puterea este de +5 V poate fi furnizată conexiunii lor.

Pe spatele consiliului, piesele trebuie tăiate, după cum se arată în figura 11.. Acestea sunt semnale "anterioare" provenite de la cipul ars 14-107540-03 și vechiul "suspend" al rezistorului R105.
Puteți organiza hrănirea semnalelor de ceas "nou" pentru a afișa 42 (ceas) utilizând un generator extern suplimentar colectat pe orice microcircuit adecvat. În acest caz, K555LN1 a fost utilizat și schema rezultată este afișată figura 12..

După "conectarea" cu firul MGTF al tensiunii de alimentare +5 V direct de la conector la ieșirea 36 (VSS) și alte conexiuni necesare ( fig.13.), Unitatea începe și funcționează non-stop. Bineînțeles, dacă cipul 14-107540-03 a fost în mod corespunzător, toată rafinamentul ar fi doar în "Treet" din cea de-a 44-a retragere la autobuz +5 V.

Pe acest "șurub", performanța sa a fost testată pentru alte frecvențe de ceas. Semnalul a fost alimentat de la un generator extern de impulsuri dreptunghiulare și frecvența minimă cu care unitatea a funcționat în mod constant 2,4 MHz. La frecvențele inferioare ciclic, era o overclockare și o oprire. Frecvența maximă este de aproximativ 7,6 MHz, cu o creștere suplimentară a creșterii sale, numărul de revoluții a rămas la fel.
Numărul de rotații depinde, de asemenea, de nivelul de tensiune la ieșirea 41 (cntsel). În Datashita de pe cipul HA13561F există o masă și corespunde valorilor obținute de la HA13555. Ca urmare a tuturor manipulărilor, a fost posibilă obținerea vitezei minime de rotație a motorului aproximativ 1800 rpm, maximul - 6864 rpm. Controlul a fost efectuat utilizând un program, optocuplers cu un amplificator și o bucată de bandă afișată pe disc astfel încât să se oprească fereastra OpTocouple la rotirea discului (în fereastra analizorului spectrului, rata de repetare a impulsului a fost determinată și apoi multiplicată cu 60).
A treia unitate - "Samsung WN310820A".
Când porniți microcircuitul, șoferul - HA13561 începe să se încălzească mult, motorul nu se rotește. În cazul cipului este convexitatea vizibilă ( fig.14.), ca în cazul precedent. Nu va funcționa niciun experiment, dar puteți încerca să salvați motorul de la bord cu microcircuitul HA13555. Conductorii subțiri lungi au fost măturați până la bucla motorului și contactele de ieșire ale conectorului plăcii electronice - totul a început și a lucrat fără probleme. Dacă HA13561 a fost un întreg, rafinamentul pentru lansare ar fi același ca și pentru trailblazer cuantic (retragerea a 44-a la busul +5 V).

A patra unitate - Cuantum Family "Fireball SE" Cu cipul unității AN8426FBP ( fig.15.).

Dacă opriți cablul blocului de cap și aplicați alimentarea pe HDD, motorul câștigă impuls și, în mod natural, după o perioadă de timp. Datashitte pe un cip AN8426FBP este online și vă puteți da seama că ieșirea 44 (SIPWM) este responsabilă pentru pornire. fig.16.). Și dacă mergeți acum pentru a tăia pista de la cipul 14-108417-02 și "Strângeți" ieșirea 44 printr-un rezistor de 4,7 com la anvelopa +5 B, motorul nu se va opri.

În cele din urmă, întoarcerea unui mic spate, formele de semnale pe ieșirile W și V Chip HA13555 în raport cu firul general au fost îndepărtate ( smochin. 17).

Cea mai simplă aplicație aplicată a vechiului HDD este o mică emerație pentru editarea rolei, cuțite, șurubelniță ( fig.18.). Pentru a face acest lucru, este suficient să rămâneți la șmirghelul de discuri magnetice. Dacă "șurubul" a fost cu mai multe "clătite", atunci puteți face discuri interschimbabile de granulație diferită. Și aici este bine să puteți schimba viteza de rotație a motorului axului, ca și în cazul unui număr mare de revoluții, este foarte ușor să furați suprafața blocată.

Știri, desigur, nu singura aplicație pentru vechiul HDD. Rețeaua conține cu ușurință designul de aspiratoare și chiar aparatul pentru gătit lână dulce ...
În plus față de text, sunt menționate date și fișiere menționate placă de circuit imprimat Generatoare de impulsuri externe În formatul de program al versiunii 5 (vedere din partea de imprimare, chips-urile sunt instalate ca SMD, adică fără găuri de găurire).
Andrei Goltsov, R9O-11, ISKITIM, aprilie 2018.
Lista elementelor radio
| Desemnare | Un fel | Nominal | număr | Notă | Scor | Caietul meu | |
|---|---|---|---|---|---|---|---|
| Vezi Figura 4. | |||||||
| DD1. | Cip | K561LN2. | 1 | În notebook. | |||
| R1, R2. | Rezistor. | 470 COM. | 2 | sMD 0805. | În notebook. | ||
| R4. | Rezistor. | 10 COM. | 1 | sMD 0805. | |||







