Lansarea vechilor HDD-uri pentru aplicații. Cum se conectează un motor de pe un DVD sau HDD Motor dintr-o aplicație de hard disk
Puteți porni un astfel de motor conectându-l la trei trepte în semi-punte, care sunt controlate de un generator trifazat, a cărui frecvență este foarte scăzută atunci când este pornit și apoi crește treptat până la cea nominală. Nu este Cea mai bună decizie sarcină, un astfel de circuit nu are feedback și, prin urmare, frecvența generatorului va crește în speranța că motorul are timp să câștige viteză, chiar dacă de fapt arborele său este staționar. Crearea unui circuit în buclă închisă ar necesita utilizarea senzorilor de poziție a rotorului și a mai multor pachete IC, fără a număra tranzistorii de ieșire. CD/DVD-ROM-ul conțin deja senzori de sală, din ale căror semnale puteți determina poziția rotorului motorului, dar uneori poziția exactă nu este deloc importantă și nu doriți să pierdeți „firele suplimentare”.
Din fericire, industria produce drivere de control gata făcute cu un singur cip, care, în plus, nu necesită senzori de poziție a rotorului; înfășurările motorului acționează ca astfel de senzori.
Chip-uri de control pentru motoarele de curent continuu trifazate care nu necesită senzori suplimentari(senzorii sunt însuși înfășurările motorului):
LB11880; TDA5140; TDA5141; TDA5142; TDA5144; TDA5145.
Mai sunt și altele, dar din anumite motive nu sunt la vânzare unde căutam și nu-mi place să aștept de la 2 la 30 de săptămâni pentru o comandă.
Schema de conectare a motorului la cipul LB11880
Inițial, acest microcircuit a fost conceput pentru a controla motorul aparatelor de înregistrare video BVG, deci este vechi, în etapele cheie are tranzistori bipolari și nu MOSFET-uri.În proiectele mele, am folosit acest microcircuit special; în primul rând, era disponibil în cel mai apropiat magazin și, în al doilea rând, costul său a fost mai mic decât cel al altor microcircuite din lista de mai sus.
De fapt, schema de comutare a motorului:

Dacă motorul dvs. nu are 3, ci 4 terminale, atunci ar trebui să fie conectat conform diagramei:

Câteva mai multe informații despre LB11880 și multe altele
Un motor conectat conform circuitelor indicate va accelera până când se atinge limita frecvenței de generare a microcircuitului VCO, care este determinată de valorile condensatorului conectat la pinul 27 (cu cât capacitatea sa este mai mică, cu atât frecvența este mai mare), sau motorul este distrus mecanic.Nu ar trebui să reduceți prea mult capacitatea condensatorului conectat la pinul 27, deoarece acest lucru poate îngreuna pornirea motorului.
Cum se reglează viteza de rotație?
Viteza de rotație este reglată prin schimbarea tensiunii la pinul 2 al microcircuitului, respectiv: Vpit - viteza maxima; 0 - motorul este oprit.
Cu toate acestea, trebuie remarcat faptul că nu va fi posibilă reglarea fără probleme a frecvenței pur și simplu folosind un rezistor variabil, deoarece reglarea nu este liniară și are loc în limite mai mici decât Vpit - 0, prin urmare cea mai bună opțiune Va exista o conexiune la acest pin a unui condensator căruia îi este furnizat un semnal PWM printr-un rezistor, de exemplu de la un microcontroler.
Pentru a determina viteza actuală de rotație, ar trebui să utilizați pinul 8 al microcircuitului, care conține impulsuri atunci când arborele motorului se rotește, 3 impulsuri pe 1 rotație a arborelui.
Cum se setează curentul maxim în înfășurări?
Se știe că motoarele trifazate de curent continuu consumă un curent semnificativ în afara modurilor lor de funcționare (când înfășurările lor sunt alimentate de impulsuri de joasă frecvență).
Pentru a seta curentul maxim în acest circuit, se folosește rezistența R1.
De îndată ce căderea de tensiune pe R1 și, prin urmare, la pinul 20 devine mai mare de 0,95 volți, driverul de ieșire al microcircuitului întrerupe pulsul.
Atunci când alegeți valoarea lui R1, rețineți că pentru acest microcircuit curentul maxim nu este mai mare de 1,2 amperi, curentul nominal este de 0,4 amperi.
Parametrii cipului LB11880
Tensiune de alimentare a treptei de ieșire (pin 21): 8 ... 13 volți (maximum 14,5);
Tensiune de alimentare la miez (pin 3): 4 ... 6 volți (maximum 7);
Puterea maximă disipată de microcircuit: 2,8 wați;
Interval de temperatură de funcționare: -20 ... +75 grade.
Dar, de fapt, de ce am folosit motorul de pe HDD împreună cu microcircuitul specificat: 
Acest disc (deși când nu erau încă șuruburi de cupru pe el), un motor aparent mic și pierzit de la un vechi hard disk Seagate Barracuda, de 40 GB, proiectat pentru 7200 de rotații/min (RPM) a reușit să accelereze până la 15000 ... 17000 de rotații. /min , dacă nu i-am limitat viteza. Deci, cred că domeniul de aplicare al motoarelor de pe hard disk-uri abandonate este destul de extins. Bineînțeles că nu poți face ascuțitor/burghiu/polizor, nici să nu te gândești, dar fără o sarcină specială motoarele sunt capabile de multe, de exemplu, dacă le folosești pentru a roti un tambur cu oglinzi , pentru scanarea mecanică a unui fascicul laser etc.
Îl am pe acesta să adună praf de mult timp motor mic, pe care l-am dezrădăcinat de pe un hard disk. Apropo, s-a păstrat și discul de pe acesta! Dacă ajung la ea, o voi înșuruba în etapa următoare. Între timp, m-am hotărât să încerc să-l reînvie. Acest motor este interesant pentru că în teorie (după cum am înțeles - o persoană care nu știa nimic despre motoare înainte) este acționat de supapă. Și așa cum ne spune Wikipedia: „motoarele cu supape sunt proiectate să se combine cele mai bune calități Motoare cu curent alternativ și motoare cu curent continuu." Și datorită absenței contactelor electrice glisante (deoarece ansamblul periei este înlocuit acolo cu un comutator semiconductor fără contact), astfel de motoare au fiabilitate ridicată și o durată de viață lungă. În plus, nu voi enumera toate alte avantaje ale acestor motoare și ale celor pe care le voi povesti chiar eu Wikipedia, dar voi spune doar că utilizarea unor astfel de gadgeturi este destul de largă, inclusiv în robotică și, prin urmare, am vrut să aflu mai multe despre principiile funcționării lor.
Principiul de funcționare al motorului HDD.
Motorul are trei înfășurări conectate după principiul stea. Punctul comun al înfășurărilor este afișat ca pozitiv. +5V este perfect pentru lucru. Motorul este controlat de un semnal PWM, care trebuie să fie furnizat înfășurărilor sale cu o defazare de 120°. Cu toate acestea, nu este posibilă furnizarea imediată a frecvenței necesare motorului; mai întâi trebuie să fie overclockat. Cel mai simplu mod conectați trei înfășurări prin tranzistoare, trimițându-le un semnal PWM de la microcontroler la bază. Voi face imediat o rezervă despre tranzistori: este mai bine să luați comutatoare de câmp, pentru că se pare că o cantitate decentă de curent curge prin ele, iar cele bipolare se încing foarte mult. Mai întâi am luat 2N2222a. S-au încălzit în câteva secunde, am rezolvat temporar problema instalând un cooler în apropiere, dar apoi am decis că am nevoie de ceva mai fiabil, adică mai mare ☺ Drept urmare, am instalat KT817G-ul nostru. Nu a fost al treilea, în schimb am un KT815G. În acest circuit, ele pot fi înlocuite, dar KT815 sunt proiectate pentru un curent constant al colectorului de 1,5 amperi și KT817 - 3A. Observ că 2N2222a este în general până la 0,8A. Nici litera KT81... nu contează, deoarece avem doar 5 volți. În teorie, frecvența de schimbare a semnalului nu este mai rapidă de 1 milisecundă, în realitate este și mai lentă, așa că nici frecvența înaltă a tranzistoarelor nu joacă un rol. În general, bănuiesc că în acest circuit puteți experimenta cu aproape orice tranzistoare tip n-p-n, cu un curent de colector de cel puțin 1 amper.
Atasez diagrama, rezistentele au fost selectate si experimental, pentru 1 kilo-ohm - functioneaza destul de bine. Am mai setat 4.7k - asta e mult, motorul a blocat.
Motorul are 4 borne. Mai întâi, să aflăm care dintre ele este comună. Pentru a face acest lucru, utilizați un multimetru pentru a măsura rezistența dintre toate terminalele. Rezistența dintre capetele înfășurărilor este de două ori mai mare decât între capătul unei înfășurări și punctul de mijloc comun. În mod convențional, 4 ohmi față de 2. Nu contează ce înfășurare este conectată unde, ei merg în continuare unul după altul.
Textul programului:
// Program pentru a porni motorul hard diskuluivoid setup()
#define P 9100 // Întârziere inițială pentru accelerarea motorului
#define x 9 // Numărul PIN la înfășurarea x
#define y 10 // Număr PIN pentru înfășurarea y
#define z 11 // Număr PIN pentru înfășurarea z
nesemnat int p; // Variabilă de întârziere pentru overclocking
long time_pass; // Temporizator
octet i = 0; // Contor ciclu de control al fazei motorului
{
p = P; // Atribuiți valoarea inițială a întârzierii pentru accelerație//Serial.begin(9600); // Deschideți portul COM pentru depanare
pinMode(x, IEȘIRE); // Setați pinii care funcționează cu motorul pentru a scoate date
pinMode(y, OUTPUT);
pinMode(z, OUTPUT);
digitalWrite(x, LOW); // Setați faza inițială a motorului, puteți începe de la oricare dintre cele 6 faze
digitalWrite(y, HIGH);
digitalWrite(z, LOW);
time_pass = micros(); // Resetarea temporizatoruluibuclă goală ()
{dacă eu< 7) && (micros () - time_pass >= p)) // Dacă contorul are un număr de la 0 la 6, iar timpul de așteptare a schimbării fazei a trecut
{
time_pass = micros(); // Resetați cronometrul
if (i == 0) ( digitalWrite (z, HIGH ); ) // Setați 0 sau 1 în funcție de numărul fazei de pe pinul dorit
dacă (i == 2) ( digitalWrite (y, LOW ); )
dacă (i == 3) ( digitalWrite (x, HIGH); )
dacă (i == 4) ( digitalWrite (z, LOW ); )
dacă (i == 5) ( digitalWrite (y, HIGH ); )
dacă (i == 6) ( digitalWrite (x, LOW ); )I++; // Adăugați contorul de faze
}
if (i >= 7) // Dacă contorul este plin
{
i = 0; // Resetează contorul
if (p > 1350) (p = p - 50;) // Dacă motorul nu a atins încă viteza maximă, reduceți timpul de schimbare a fazei
//Serial.println(p); Timeout depanare
}
Care este rezultatul?
Rezultatul este un motor care accelerează în câteva secunde. Uneori, accelerația devine dezechilibrată și motorul se oprește, dar cel mai adesea totul funcționează. Încă nu știu cum să-l stabilizez. Dacă opriți motorul manual, acesta nu va porni din nou - trebuie să reporniți programul. Până acum, acesta este maximul pe care l-am putut strânge din el. Când p scade sub 1350, motorul iese din accelerație. 9100 a fost selectat și experimental la început, puteți încerca să îl schimbați și să vedeți ce se întâmplă. Numerele vor fi probabil diferite pentru alt motor - a trebuit să le ajustez pentru al meu. Cu sarcina ( discul original) motorul nu mai pornește, așa că instalarea a ceva pe el va necesita calibrarea din nou a firmware-ului. Se învârte relativ repede, așa că recomand să purtați ochelari la pornire, mai ales dacă este ceva atârnat de el în acel moment. Sper să continui să experimentez cu el. Asta e tot deocamdată, succes tuturor!
Cu ceva timp în urmă am dat peste un circuit de șoferi motor pas cu pas pe cipul LB11880, dar din moment ce nu aveam un astfel de cip și erau mai multe motoare în jur, am pus proiectul interesant de a porni motorul în așteptare. Timpul a trecut, iar acum odată cu dezvoltarea Chinei nu sunt probleme cu piesele, așa că am comandat un MS și am decis să asamblez și să testez conexiunea motoarelor de mare viteză de pe HDD. Circuitul driverului este luat standard:
Circuitul de acționare a motorului
Mai jos este o scurtă descriere a articolului; citiți articolul complet. Motorul care rotește axul unui hard disk (sau CD/DVD-ROM) este un motor de curent continuu trifazat sincron convențional. Industria produce drivere de control gata făcute cu un singur cip, care, în plus, nu necesită senzori de poziție a rotorului, deoarece înfășurările motorului acționează ca astfel de senzori. Cipurile de control trifazate ale motoarelor de curent continuu care nu necesită senzori suplimentari sunt TDA5140; TDA5141; TDA5142; TDA5144; TDA5145 și bineînțeles LB11880.

Un motor conectat conform circuitelor indicate va accelera până când se atinge limita frecvenței de generare a microcircuitului VCO, care este determinată de valorile condensatorului conectat la pinul 27 (cu cât capacitatea sa este mai mică, cu atât frecvența este mai mare), sau motorul este distrus mecanic. Nu ar trebui să reduceți prea mult capacitatea condensatorului conectat la pinul 27, deoarece acest lucru poate îngreuna pornirea motorului. Viteza de rotatie se regleaza prin modificarea tensiunii la pinul 2 al microcircuitului, respectiv: Vpit - viteza maxima; 0 - motorul este oprit. Există și un sigiliu de la autor, dar am creat propria mea versiune ca una mai compactă.

Ulterior, au sosit microcircuitele LB11880 pe care le-am comandat, le-am lipit în două eșarfe gata făcute și am testat unul dintre ele. Totul funcționează grozav: viteza este reglată de un cadran de viteză variabilă, este greu de determinat rotațiile, dar cred că e până la 10.000 cu siguranță, deoarece motorul zumzea decent.

În general, s-a făcut un început, mă voi gândi unde să-l aplic. Există o idee de a face același disc de ascuțire din el ca al autorului. Și acum l-am testat pe o bucată de plastic, l-am făcut ca un ventilator, suflă pur și simplu brutal, deși în fotografie nici măcar nu poți vedea cum se învârte.

Puteți crește viteza peste 20.000 prin comutarea capacităților condensatorului C10 și furnizarea energiei către MS până la 18 V (limită de 18,5 V). La această tensiune motorul meu a fluierat complet! Iată un videoclip cu putere de 12 volți:
Video de conectare a motorului HDD
Am conectat si motorul de la CD, l-am condus cu o sursa de 18 V, din moment ce al meu are bile inauntru, accelereaza ca sa sara totul in jur! Este păcat să nu urmărești revoluțiile, dar judecând după sunet, este foarte înalt, până la un fluier subțire. Unde să aplici astfel de viteze este întrebarea? Îți vin în minte o mini polizor, un burghiu de masă, o mașină de ascuțit... Există multe aplicații - gândește-te singur. Colectați, testați, împărtășiți-vă impresiile. Există multe recenzii pe Internet care folosesc aceste motoare în mod interesant structuri de casă. Am vazut un video pe internet, unde Kulibins fac pompe, super ventilatoare, ascutit cu aceste motoare, ma intreb unde se pot folosi astfel de viteze, motorul de aici accelereaza peste 27.000 rpm. am fost cu tine Igoran.
Discutați articolul CUM SE CONECTEAZĂ UN MOTOR DE PE UN DVD SAU HDD
. Subiectul este cu siguranță interesant, mai ales pentru „chinuitorii” radio începători, dar în opinia mea este departe de a fi acoperit pe deplin. Nuconcluzie logică și anume ce schemă a folosit mult respectatul, TwIsTeRpentru decizia mea, fie că a fost propusă (de colegul meu din activitatea jurnalistică)S anyaav pe M/S TDA5145, MK sau altul. Cu acest articol vreau să completez câteva dintre golurile din forum și să vă povestesc, după părerea mea, despre un microcircuit vechi care este destul de decent chiar și după standardele moderne.LIVRE11880. Să începem și să începem cu informații generale, ce este un motor de pe un HDD, CD-ROM, DVD-ROMMotor care rotește axul hard diskului (sau CD/DVD-ROM) este un motor de curent continuu trifazat sincron.
Puteți porni un astfel de motor conectându-l la trei cascade în jumătate de punte, care sunt controlate de un generator trifazat, a cărui frecvență este foarte scăzută atunci când este pornit și apoi crește treptat până la cea nominală. Aceasta nu este cea mai bună soluție la problemă, un astfel de circuit nu are feedback și, prin urmare, frecvența generatorului va crește în speranța că motorul are timp să câștige viteză, chiar dacă de fapt arborele său este staționar. Crearea unui circuit în buclă închisă ar necesita utilizarea senzorilor de poziție a rotorului și a mai multor pachete IC, fără a număra tranzistorii de ieșire. CD/DVD-ROM-ul conțin deja senzori de sală, din ale căror semnale puteți determina poziția rotorului motorului, dar uneori poziția exactă nu este deloc importantă și nu doriți să pierdeți „firele suplimentare”.
Din fericire, industria produce drivere de control gata făcute cu un singur cip, care, în plus, nu necesită senzori de poziție a rotorului; înfășurările motorului acționează ca astfel de senzori.Chip-uri de control pentru motoarele de curent continuu trifazate care nu necesită senzori suplimentari (senzorii sunt înfășurările motorului în sine):TDA 5140; TDA 5141; TDA 5142; TDA 5144; TDA 5145 și bineînțeles LIVRE 11880. (Sunt și altele, dar pentru altă dată.)
Schema de conectare a motorului la microcircuitul LB11880.
Inițial, acest microcircuit este conceput pentru a controla motorul aparatelor de înregistrare video BVG; în etapele cheie are tranzistori bipolari și nu MOSFET.În proiectele mele, am folosit acest microcircuit special; în primul rând, era disponibil în cel mai apropiat magazin și, în al doilea rând, costul său a fost mai mic (deși nu cu mult) decât cel al altor microcircuite din lista de mai sus.
De fapt, schema de comutare a motorului:

Dacă motorul dvs. are brusc nu 3, ci 4 ieșiri, atunci ar trebui să fie conectat conform diagramei:

Și o altă diagramă mai vizuală, adaptată pentru utilizare într-o mașină.
Câteva mai multe informații despre LB11880 și multe altele
Un motor conectat conform circuitelor indicate va accelera până când se atinge limita frecvenței de generare a microcircuitului VCO, care este determinată de valorile condensatorului conectat la pinul 27 (cu cât capacitatea sa este mai mică, cu atât frecvența este mai mare), sau motorul este distrus mecanic.Nu ar trebui să reduceți prea mult capacitatea condensatorului conectat la pinul 27, deoarece acest lucru poate îngreuna pornirea motorului.
Cum se reglează viteza de rotație?
Viteza de rotatie se regleaza prin modificarea tensiunii la pinul 2 al microcircuitului, respectiv: Vpit - viteza maxima; 0 - motorul este oprit.
Cu toate acestea, trebuie remarcat faptul că nu va fi posibilă reglarea fără probleme a frecvenței pur și simplu prin utilizarea unui rezistor variabil, deoarece reglarea nu este liniară și are loc în limite mai mici decât Vpit - 0, deci cea mai bună opțiune ar fi conectarea unui condensator. la acest pin la care, printr-un rezistor, de exemplu, de la un microcontroler, semnal PWM sau controler PWM pe cronometrul de renume mondialNE555 (există o mulțime de astfel de scheme pe internet)
Pentru a determina viteza actuală de rotație, ar trebui să utilizați pinul 8 al microcircuitului, care conține impulsuri atunci când arborele motorului se rotește, 3 impulsuri pe 1 rotație a arborelui.
Cum se setează curentul maxim în înfășurări?
Se știe că motoarele trifazate de curent continuu consumă un curent semnificativ în afara modurilor lor de funcționare (când înfășurările lor sunt alimentate de impulsuri de joasă frecvență).Pentru a seta curentul maxim în acest circuit, se folosește rezistența R1.De îndată ce căderea de tensiune pe R1 și, prin urmare, la pinul 20 devine mai mare de 0,95 volți, driverul de ieșire al microcircuitului întrerupe pulsul.Atunci când alegeți valoarea lui R1, rețineți că pentru acest microcircuit curentul maxim nu este mai mare de 1,2 amperi, curentul nominal este de 0,4 amperi.
Parametrii cipului LB11880
Tensiune de alimentare a treptei de ieșire (pin 21): 8 ... 13 volți (maximum 14,5);
Tensiune de alimentare la miez (pin 3): 4 ... 6 volți (maximum 7);
Puterea maximă disipată de microcircuit: 2,8 wați;
Interval de temperatură de funcționare: -20 ... +75 grade.

Acest disc (deși atunci când nu erau încă șuruburi de cupru pe el), un motor aparent mic și pierzit de pe un hard disk vechi de 40 GB, proiectat pentru 7200 de rotații/min (RPM), a reușit să accelereze la aproximativ 15000 ... 17000 de rotații/ min, dacă nu îi limitați viteza. Deci, cred că domeniul de aplicare al motoarelor de pe hard disk-uri abandonate este destul de extins. Bineînțeles, nu poți să faci o ascuțitoare/găurit/polizor, nici să nu te gândești la asta, dar fără o sarcină specială, motoarele sunt capabile de multe.
F
arhiva fisiere pt auto-asamblare Descarca
NOROC!!
Când utilizați unități HDD vechi în scopuri de aplicare, uneori apare o problemă că motorul axului se oprește la ceva timp după pornire. Ei au un astfel de „truc” - dacă nu sunt primite semnale de la blocul de cap la cipul controlerului, atunci interzice cipului șoferului să rotească motorul. Folosind mai multe modele de unitate ca exemplu, vom încerca să ne dăm seama cum să remediam acest lucru.
Totul a început cu faptul că au adus câteva hard disk-uri vechi ( Fig.1) și au spus că aici muncitorii sunt amestecați cu „uciși”, dacă vrei, alege, dacă nu vrei, fă ce vrei. Dar dacă îți dai seama cum să le folosești ca șmirghel mic pentru a îndrepta un instrument, spune-mi. Ei bine, aici vă spun...
Primul HDD - „Quantum” din familia „Fireball TM”. cu cip de unitate TDA5147AK ( Fig.2). Să vedem cum este.
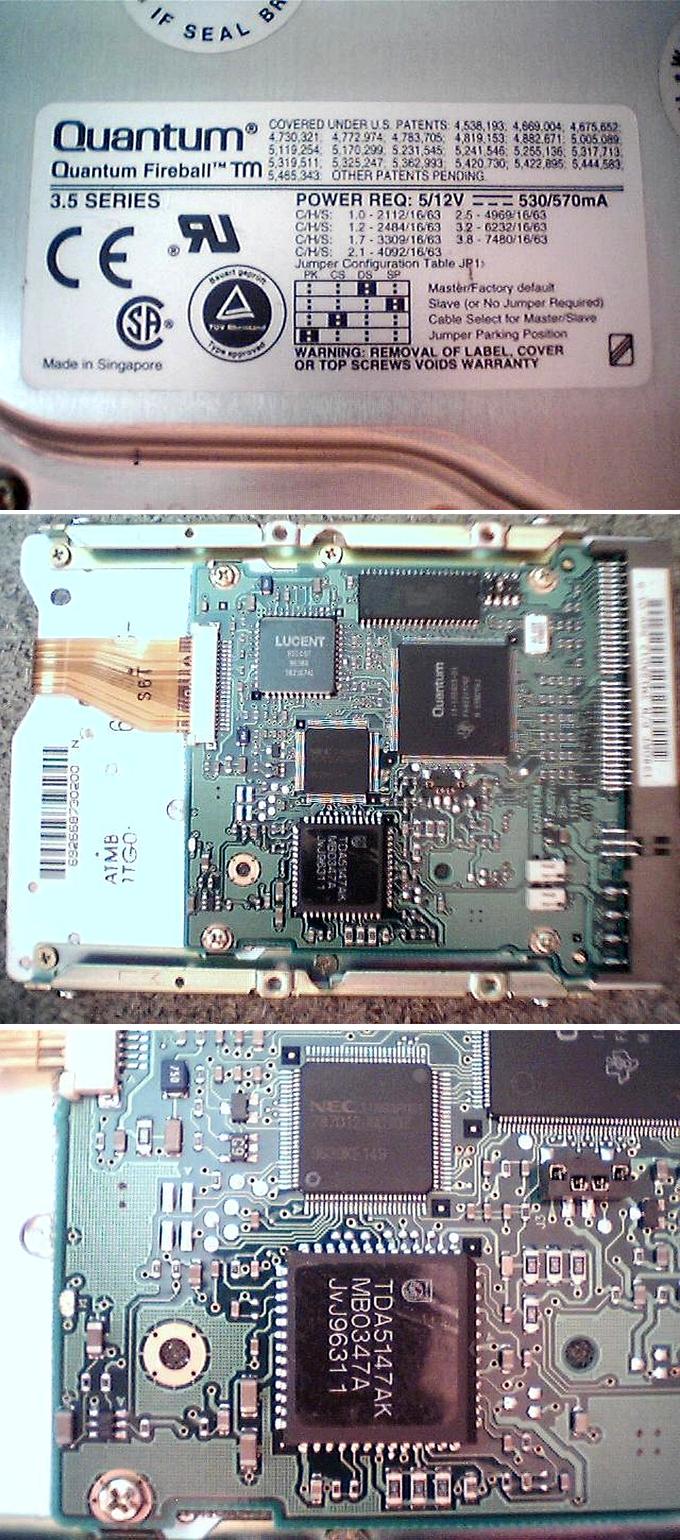
Capacul superior este fixat cu 4 șuruburi în colțuri și un șurub și piuliță situate deasupra, sub autocolante. După îndepărtarea capacului, hard disk-ul în sine, capetele de citire și sistemul de control al poziției capului magnetic sunt vizibile ( Fig.3). Deconectam cablul, deșurubam sistemul magnetic (aici veți avea nevoie de o cheie hexagonală special ascuțită „asterisc”). Dacă se dorește, discul poate fi îndepărtat și prin deșurubarea celor trei șuruburi de pe axul motorului (este necesară și o cheie hexagonală).

Acum punem capacul la loc, astfel încât să putem întoarce HDD-ul pentru experimente cu electronice și să aplicăm tensiune de +5 V și +12 V la conectorul de alimentare. Motorul accelerează, funcționează aproximativ 30 de secunde și apoi se oprește (există un LED verde pe placa de circuit - se aprinde când motorul se rotește și clipește când se oprește).
Fișa de date pentru cipul TDA5147K se găsește cu ușurință pe Internet, dar nu a fost posibil să se descopere semnalul de activare/dezactivare a rotației folosindu-l. La „tragerea” semnalelor POR către magistralele de alimentare, nu a fost posibil să se obțină reacția dorită, dar la vizualizarea semnalelor cu un osciloscop, s-a dovedit că atunci când sonda atinge al 7-lea pin al chipului TDA5147AK, se resetează. si reporneste motorul. Astfel, după ce a adunat generator simplu impulsuri scurte ( Fig.4, foto de jos) cu o perioadă de câteva secunde (sau zeci de secunde), puteți face ca motorul să se rotească mai mult sau mai puțin constant. Pauzele rezultate în alimentarea cu energie durează aproximativ 0,5 secunde și acest lucru nu este critic dacă motorul este utilizat cu o sarcină ușoară pe arbore, dar în alte cazuri poate fi inacceptabil. Prin urmare, deși metoda este eficientă, nu este în întregime corectă. Dar nu a fost niciodată posibil să-l lansăm „corect”.

Următorul HDD – „Quantum” al familiei „Trailblazer”. (Fig.5).

Când se aplică tensiunea de alimentare, unitatea nu prezintă semne de viață și microcircuitul 14-107540-03 de pe placa electronică începe să se încălzească foarte mult. Există o umflătură vizibilă în mijlocul corpului microcircuitului ( Fig.6), ceea ce indică inoperabilitatea sa evidentă. E păcat, dar nu înfricoșător.

Ne uităm la cipul de control al rotației motorului ( Fig.7) - HA13555. Nu se încălzește atunci când este aplicată puterea și nu există nicio deteriorare vizibilă a acestuia. Testarea de către tester a elementelor de „conducte” nu a scos la iveală nimic special - tot ce rămâne este să descoperiți circuitul de „pornire”.

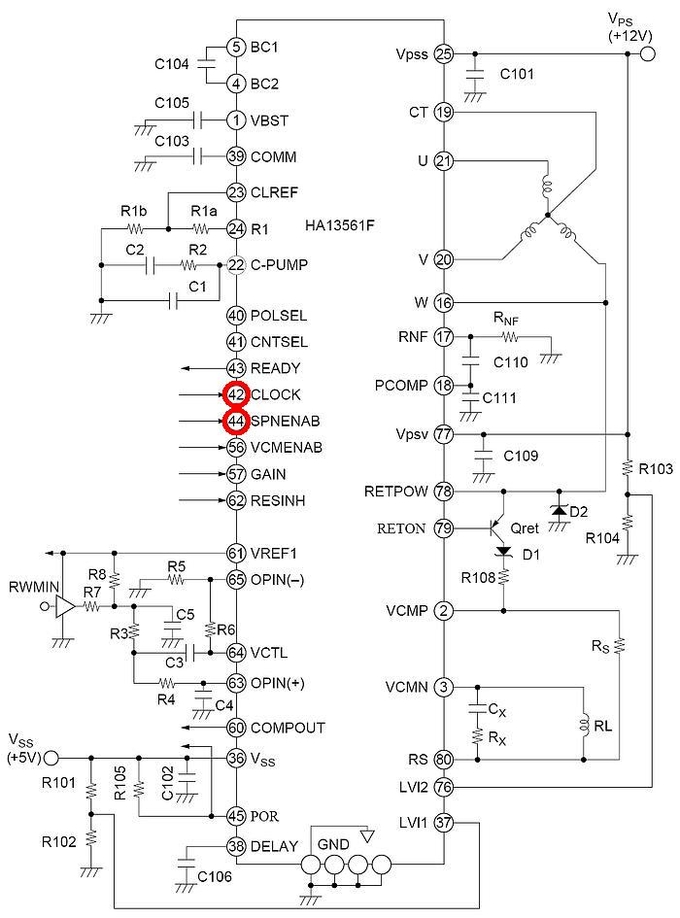
Motoarele de căutare nu găsesc foi de date pentru acesta, dar există o descriere pentru HA13561F. Este realizat în același caz, potrivește picioarele de putere și pinii de „ieșire” cu HA13555 (cel din urmă are diode lipite la conductorii de putere a motorului - protecție împotriva EMF inversă). Să încercăm să determinăm ieșirile de control necesare. Din fișa tehnică de pe HA13561F ( Fig.8) rezultă că pinul 42 (CLOCK) trebuie să fie alimentat cu o frecvență de ceas de 5 MHz cu un nivel logic TTL și că semnalul care permite pornirea motorului este nivel inalt la pinul 44 (SPNENAB).
Deoarece microcircuitul 14-107540-03 nu funcționează, întrerupem sursa de alimentare +5 V de la acesta și de la toate celelalte microcircuite, cu excepția HA13555 ( Fig.9). Cu ajutorul unui tester, verificăm corectitudinea „tăierilor” prin absența conexiunilor.
În fotografia de jos figura 9 Punctele roșii arată locurile în care tensiunea de +5 V este lipită pentru HA13555 și rezistența de tragere a celor 44 de pini ai săi. Dacă rezistorul de la pinul 45 este scos din locul său original (acesta este R105 conform Figura 8) și plasați-l vertical cu o anumită înclinare față de microcircuit, apoi un rezistor suplimentar pentru tragerea pinului 44 la „plus” poate fi lipit la orificiul de trecere și la știftul de suspendare al primului rezistor ( Fig.10) și apoi puterea de +5 V poate fi furnizată la locul unde sunt conectate.

Pe partea din spate a plăcii, șinele trebuie tăiate, așa cum se arată în Figura 11. Acestea sunt semnale „foste” care provin de la microcircuitul ars 14-107540-03 și vechiul rezistor „pull-up” R105.

Puteți organiza furnizarea de „noi” semnale de ceas la pinul 42 (CEAS) folosind un generator extern suplimentar asamblat pe orice cip adecvat. În acest caz, a fost folosit K555LN1 și circuitul rezultat este afișat în Figura 12.

După „aruncarea” tensiunii de alimentare de +5 V cu firul MGTF direct de la conector la pinul 36 (Vss) și alte conexiuni necesare ( Fig.13), unitatea pornește și funcționează non-stop. Desigur, dacă microcircuitul 14-107540-03 ar fi în stare bună de funcționare, toată modificarea ar consta doar în „strângerea” pinului 44 la magistrala +5 V.

Acest „șurub” a fost folosit pentru a-și testa performanța la alte frecvențe de ceas. Semnalul a fost furnizat de la un generator extern de unde pătrate și frecvența minimă la care unitatea a funcționat stabil a fost de 2,4 MHz. La frecvențe mai mici, accelerația și oprirea au avut loc ciclic. Frecvența maximă este de aproximativ 7,6 MHz; odată cu creșterea sa în continuare, numărul de rotații a rămas același.
Numărul de rotații depinde și de nivelul tensiunii de la pinul 41 (CNTSEL). Există un tabel în fișa de date pentru cipul HA13561F și corespunde valorilor obținute de la HA13555. Ca urmare a tuturor manipulărilor, a fost posibil să se obțină o turație minimă de rotație a motorului de aproximativ 1800 rpm și o turație maximă de 6864 rpm. Controlul s-a efectuat folosind un program, un optocupler cu un amplificator și o bucată de bandă electrică lipită de disc, astfel încât atunci când discul se rotește să se suprapună pe fereastra optocuplerului (rata de repetiție a pulsului este determinată în fereastra analizorului de spectru și apoi multiplicată până la 60).
A treia unitate - „SAMSUNG WN310820A”.
Când este aplicată puterea, cipul driverului - HA13561 începe să devină foarte fierbinte, motorul nu se rotește. Există o umflătură vizibilă pe corpul cipului ( Fig.14), ca și în cazul precedent. Nu va fi posibil să efectuați niciun experiment, dar puteți încerca să alimentați motorul de la o placă cu cipul HA13555. Conductoarele lungi și subțiri au fost lipite la cablul motorului și la contactele de ieșire ale conectorului plăcii electronice - totul a pornit și a funcționat fără probleme. Dacă HA13561 ar fi intact, modificarea pentru lansare ar fi aceeași ca și pentru Quantum Trailblazer (pin 44 la magistrala +5 V).

A patra unitate - „Quantum” al familiei „Fireball SE”. cu cip de unitate AN8426FBP ( Fig.15).

Dacă deconectați cablul unității principale și aplicați alimentarea HDD-ului, motorul crește viteza și, în mod natural, se oprește după un timp. Fișa de date pentru cipul AN8426FBP este disponibilă online și o puteți folosi pentru a vă da seama că pinul 44 (SIPWM) este responsabil pentru pornire ( Fig.16). Și dacă acum tăiați pista care vine de la microcircuitul 14-108417-02 și „trageți în sus” pinul 44 printr-un rezistor de 4,7 kOhm la magistrala +5 V, atunci motorul nu se va opri.

Și, în sfârșit, revenind puțin înapoi, formele de undă au fost luate la pinii W și V ai cipul HA13555 în raport cu firul comun ( orez. 17).

Cea mai simplă utilizare practică a unui HDD vechi este un smirghel mic pentru îndreptarea burghiilor, cuțitelor, șurubelnițelor ( Fig.18). Pentru a face acest lucru, trebuie doar să lipiți șmirghel pe discul magnetic. Dacă „șurubul” avea mai multe „clătite”, atunci puteți face discuri înlocuibile de diferite dimensiuni ale granulelor. Și aici ar fi bine să puteți comuta viteza de rotație a motorului axului, deoarece cu un număr mare de rotații este foarte ușor să supraîncălziți suprafața care este ascuțită.

Emery, desigur, nu este singura utilizare pentru un HDD vechi. Modele pentru aspiratoare și chiar și o mașină pentru a face vată de zahăr pot fi găsite cu ușurință online...
Pe lângă text există fișele de date și fișierele menționate plăci de circuite imprimate generatoare de impulsuri externe în format de program versiunea 5 (vedere din partea de imprimare, microcircuitele sunt instalate ca SMD, adică fără găuri).
Andrey Goltsov, r9o-11, Iskitim, aprilie 2018.
Lista radioelementelor
| Desemnare | Tip | Denumire | Cantitate | Notă | Magazin | Blocnotesul meu | |
|---|---|---|---|---|---|---|---|
| La poza nr. 4 | |||||||
| DD1 | Chip | K561LN2 | 1 | La blocnotes | |||
| R1, R2 | Rezistor | 470 kOhm | 2 | smd 0805 | La blocnotes | ||
| R4 | Rezistor | 10 kOhm | 1 | smd 0805 | |||









